Emitter Geolocation
Est. read time: 1 minute | Last updated: July 17, 2026 by John Gentile
Contents
![]()
import numpy as np
import matplotlib.pyplot as plt
from rfproto import impairments, plot, sig_gen
import plotly.graph_objects as go
import plotly.io as pio
pio.renderers.default = "png" # "notebook_connected"
fs = 10e6
num_chirp_samples = 2000
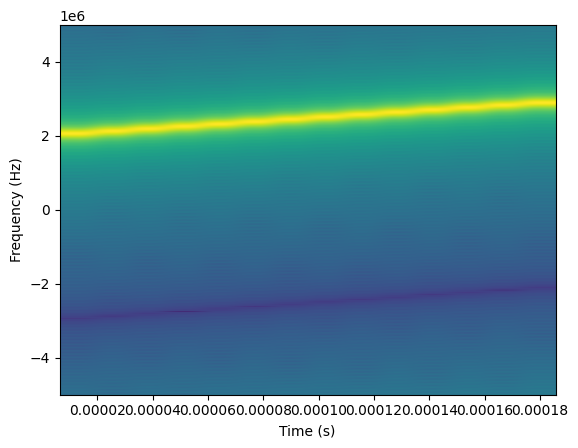
upchirp = sig_gen.cmplx_dt_lfm_chirp(2.0, 2e6, 3e6, fs, num_chirp_samples)
plt.specgram(upchirp, pad_to=1024, Fs=fs)
plt.xlabel('Time (s)')
plt.ylabel('Frequency (Hz)')
plt.show()
pulse_plus_noise = impairments.awgn(1.0, 5 * num_chirp_samples)
pulse_plus_noise[3000:5000] += upchirp
plt.specgram(pulse_plus_noise, pad_to=1024, Fs=fs)
plt.xlabel('Time (s)')
plt.ylabel('Frequency (Hz)')
plt.show()
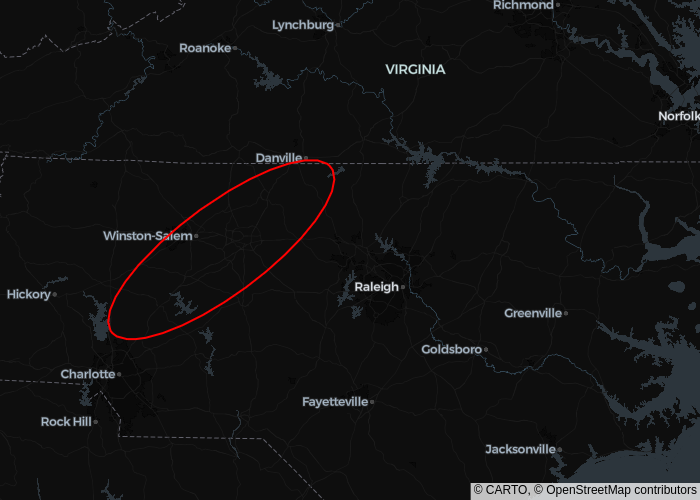
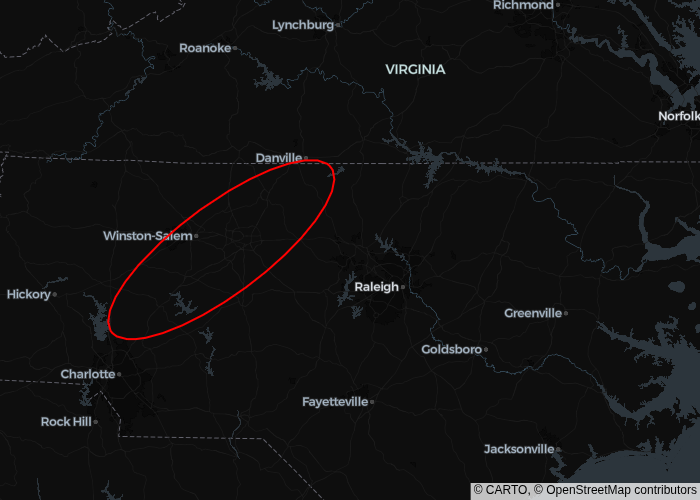
def ellipse(x_center=0, y_center=0, angle=0.0, a=1, b=1, N=100):
angle = np.deg2rad(angle)
ax1 = [np.cos(angle), np.sin(angle)]
ax2 = [-np.sin(angle), np.cos(angle)]
t = np.linspace(0, 2*np.pi, N)
xs = a * np.cos(t)
ys = b * np.sin(t)
R = np.array([ax1, ax2]).T
xp, yp = np.dot(R, [xs, ys])
x = xp + x_center
y = yp + y_center
return x, y
fig = go.Figure(go.Scattermap(mode="markers"))
fig.update_layout(
margin={'r':0,'t':0,'l':0,'b':0},
map = {
'style': "dark",
'center': {'lon': -79, 'lat': 36 },
'zoom': 6.5
},
)
x_center = -80 # Example longitude
y_center = 36 # Example latitude
a = 1 # Semi-major axis (in degrees of lat/lon, approximate)
b = 0.3 # Semi-minor axis (in degrees of lat/lon, approximate)
angle = 30 # Rotation angle
x, y = ellipse(x_center, y_center, angle, a, b)
fig.add_trace(go.Scattermap(
mode="lines",
lon=x,
lat=y,
marker={'size': 10},
line={'color': 'red'}
))
fig.show()
References
- Emitter Detection and Geolocation for Electronic Warfare
- nodonoughue/emitter-detection-book (MATLAB) & nodonoughue/emitter-detection-python (Python)
- Joint TDOA, FDOA and PDOA Localization Approaches and Performance Analysis
- Object Tracking Using Time Difference of Arrival (TDOA) - Mathworks
Maintained by John Gentile • Found a problem on this site? File an Issue
This work is licensed under a Creative Commons Attribution 4.0 International License.![]()