Filtering Fundamentals
Est. read time: 2 minutes | Last updated: July 27, 2026 by John Gentile
Contents
- Filter Design
- FIR Filters
- Windowing
- Filter Implementation
- Parallel/Vectorized Filter/Convolution
- References
![]()
import numpy as np
from scipy import signal
import matplotlib.pyplot as plt
from rfproto import utils
Filter Design
Estimate Filter Order
One practical estimate comes from fred harris’ rule-of-thumb:
Where:
- is the desired stopband attenuation, in dB.
- is the normalized transition band, or
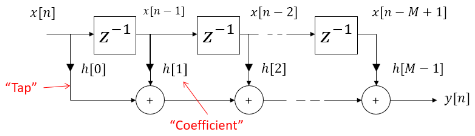
FIR Filters
The discrete-time convolution of filter coefficients with input samples can be seen as:
class fir_filter:
"""Naive class to demonstrate direct-form FIR filtering. If wanting to efficiently compute the direct-form convolution, see [SciPy Signal's lfilter](https://docs.scipy.org/doc/scipy/reference/generated/scipy.signal.lfilter.html)"""
def __init__(self, h: np.ndarray):
self.N = len(h)
self.h = h
self.dly = np.zeros(self.N)
def step(self, x: float) -> float:
# First shift in sample into delay line
for i in reversed(range(self.N)):
if i < self.N - 1:
self.dly[i + 1] = self.dly[i]
self.dly[0] = x
# Next multiply and accumulate the discrete convolution of delay line
# samples and filter tap coefficients
mac = 0.0
for i in range(self.N):
mac += self.dly[i] * self.h[i]
return mac
def reset(self):
self.dly = np.zeros(self.N)
test_filt = fir_filter([0, 0, 1, 0, 0])
for i in range(10):
print(test_filt.step(i+1))
0.0 0.0 1.0 2.0 3.0 4.0 5.0 6.0 7.0 8.0
Efficient FIR Structures
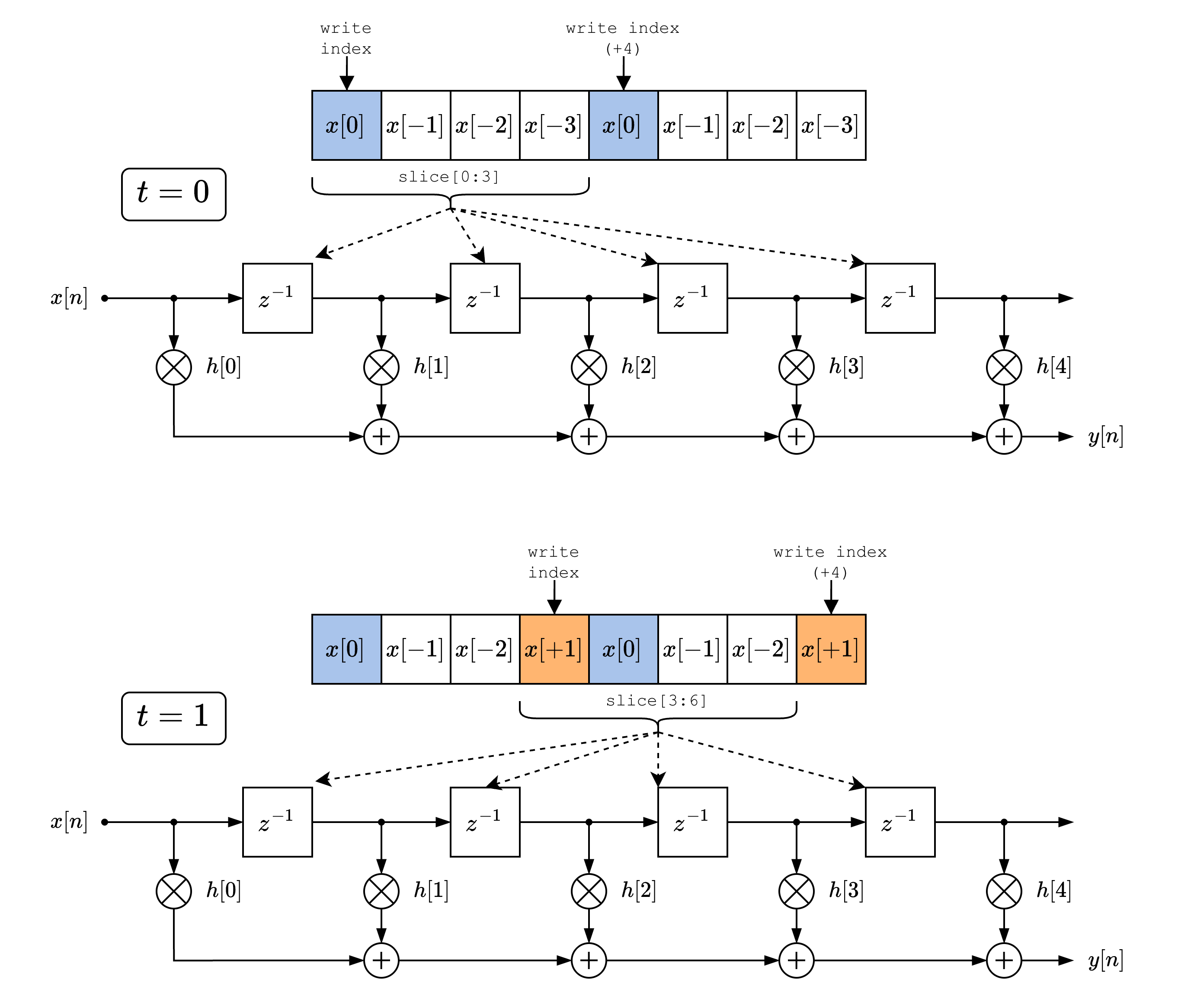
Software Double-Buffering
Shifting sample values within a buffer (e.x. common delay line approach where last value is shifted out, while newest value is shifted in) is very expensive in data movement and cycles. Instead, we can simply double buffer the sample delay line, and write a new sample in two locations- in this way, we can simply shift the a pointer within the double buffer to take a slice during convolution, drastically reducing overhead:
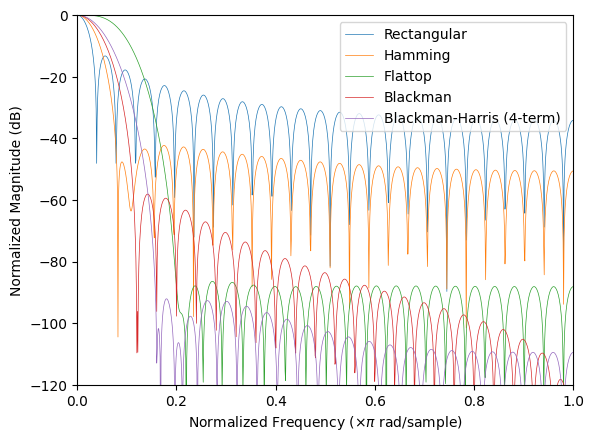
Windowing
- Window function - Wikipedia: includes list of window functions with example of time and frequency domain responses.
plt.figure()
num_pts = 51
windows = {}
windows['Rectangular'] = signal.windows.boxcar(num_pts)
windows['Hamming'] = signal.windows.hamming(num_pts)
windows['Flattop'] = signal.windows.flattop(num_pts)
windows['Blackman'] = signal.windows.blackman(num_pts)
windows['Blackman-Harris (4-term)'] = signal.windows.blackmanharris(num_pts)
for window in windows:
A = np.fft.rfft(windows[window], n=2048) / (num_pts/2.0)
response = np.abs(A / abs(A).max())
response = 20 * np.log10(np.maximum(response, 1e-10))
freq = np.linspace(0, 1, len(response))
plt.plot(freq, response, label=window, linewidth=0.5)
plt.axis([0, 1.0, -120, 0])
plt.ylabel("Normalized Magnitude (dB)")
plt.xlabel(r"Normalized Frequency ($\times\pi$ rad/sample)")
plt.legend()
plt.show()
Filter Implementation
Complex-Valued Filters
Rarely you’ll need to use a complex-valued filter- often you’re looking to apply a filter on complex-valued input signals. In this case, the same real filter tap values and convolution process can happen in parallel on both real and imaginary parts of the signal.
References
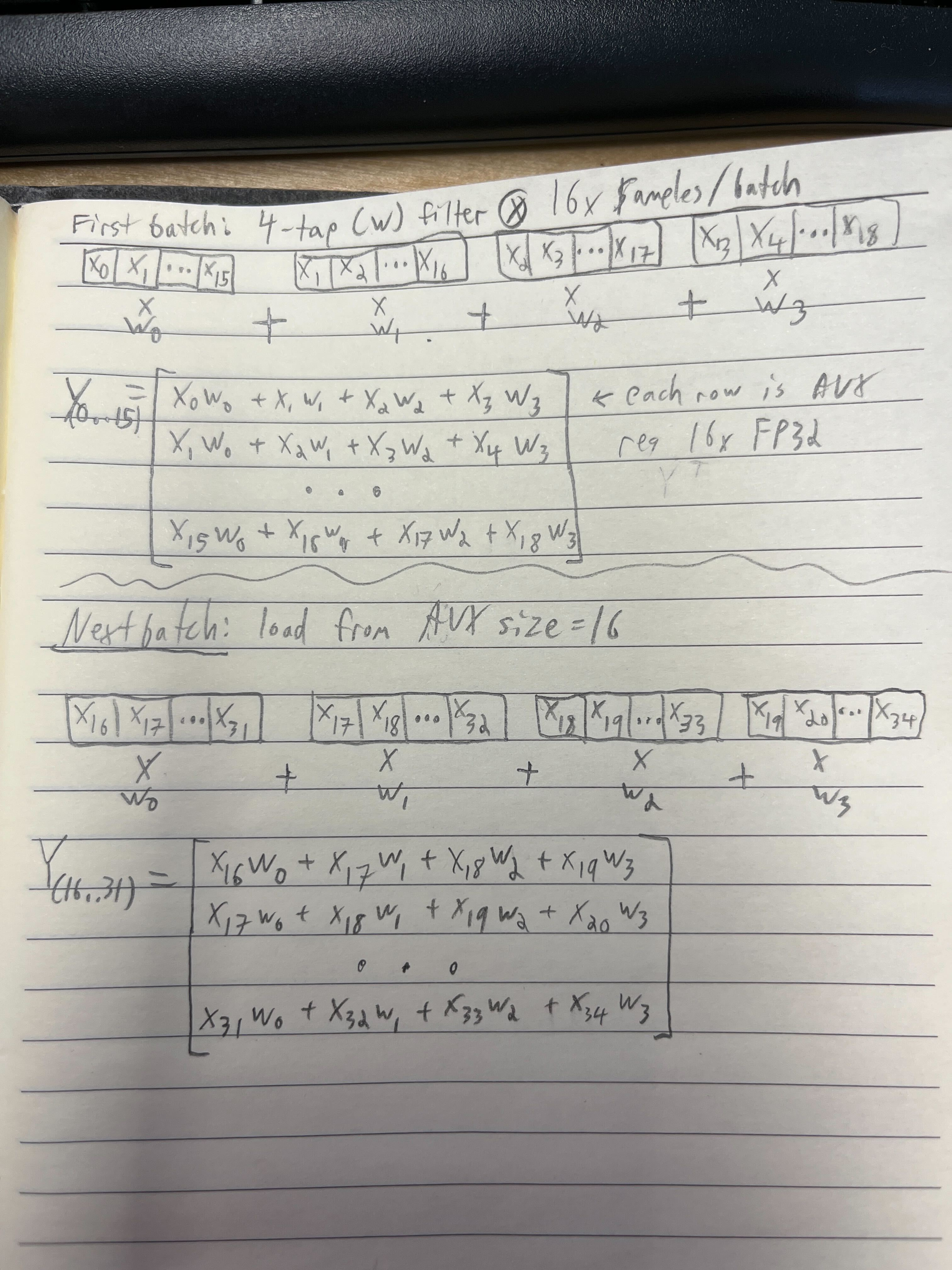
Parallel/Vectorized Filter/Convolution
References
- DSP: Designing for Optimal Results High-Performance DSP Using Virtex-4 FPGAs: how to design FIR filters in FPGAs for speed and resources based on DSP primitives.
- FIR Compiler LogiCORE IP Product Guide (PG149) - AMD Xilinx: notes on Xilinx specific FIR filter IP core, with notes on how different filter structures can be exploited for symmetry, sampling rates, etc.
Maintained by John Gentile • Found a problem on this site? File an Issue
This work is licensed under a Creative Commons Attribution 4.0 International License.![]()